丂丂丂丂丂丂丂丂丂丂丂丂丂俈僙僌昞帵廃攇悢僇僂儞僞乕
丂丂俈僙僌儊儞儞僩俴俤俢昞帵偺廃攇悢僇僂儞僞乕傪 俹俬俠傪棙梡偟偰嶌惢偡傞偙偲傪帋傒偨丅丂偦偺偨傔偵丄俹俬俠偺 僞僀儅乕婡擻偲 妱傝崬傒偺庤朄傪梡偄偨丅
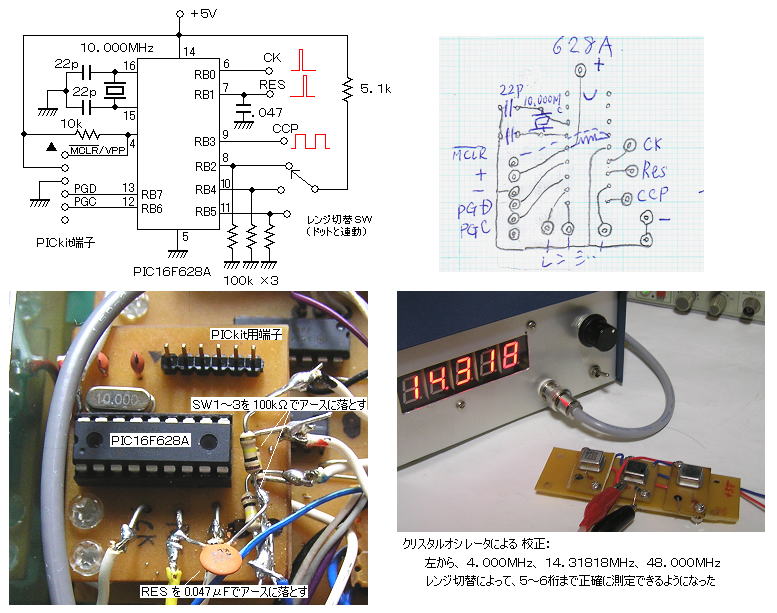
丂丂侾丏丂挷惍壜擻側婎弨怣崋敪惗婍偺嶌惉丗
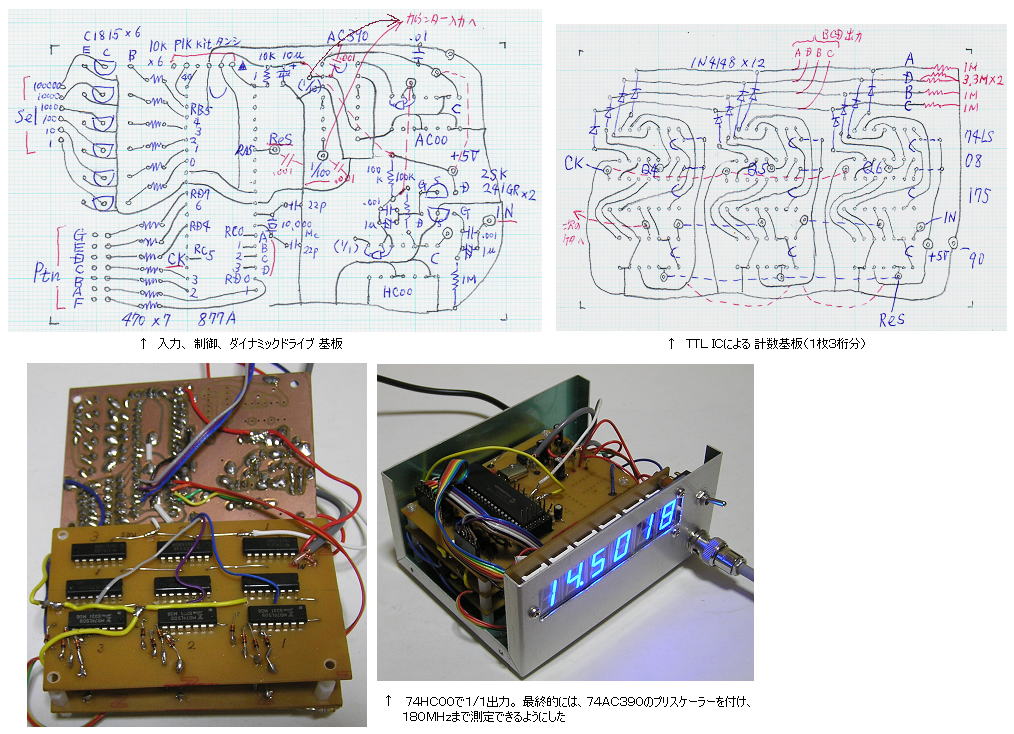
丂丂俿俿俴 俬俠偱嶌惢偟偨俆寘廃攇悢僇僂儞僞乕偺侾侽恑婎弨怣崋敪惗婍偺戙傢傝偵丄俹俬俠侾俇俥俇俀俉俙偵傛傞 僎乕僩僞僀儉偑挷惍壜擻側婎弨怣崋敪惗婍傪愝偗丄僗僀僢僠偺愗傝懼偊偵傛偭偰 栺侽丏侾俽丄侽丏侽侾俽丄侽丏侽侽侾俽娫妘偺僟僽儖丒僋儘僢僋僷儖僗偵傛偭偰俿俿俴 俬俠僇僂儞僞乕婎斅偺儔僢僠丄僋儕傾傪峴偄丄奺僎乕僩僞僀儉偛偲偵惓妋偵廃攇悢傪僇僂儞僩偡傞傛偆偵夵憿偟偨丅
丂丂俼俤俽乮鼐乯抂巕偵侽丏侽係俈兪俥傪擖傟傞偙偲偵傛傝丄僟僀僫儈僢僋僪儔僀僽偺昞帵偢傟傪夝徚偟偨丅傑偨丄僆乕僾儞帪偺 俽倂偑姰慡偵 侽偵側傞偨傔偵偼丄乮僾儖傾僢僾傪偟偰偄側偄偵傕偐偐傢傜偢丄俹俬俠偼俠亅俵俷俽側偺偱丄乯侾侽侽倠兌偱傾乕僗偵棊偲偡昁梫偑偁傞丅
丂丂傑偨丄僾儘僌儔儉偺僞僀儅侾偺弶婜抣傪旝挷惍偟傗偡偄傛偆偵丄俹俬俠 倠倝倲 抂巕傪愝偗偨丅
丂丂丂丂
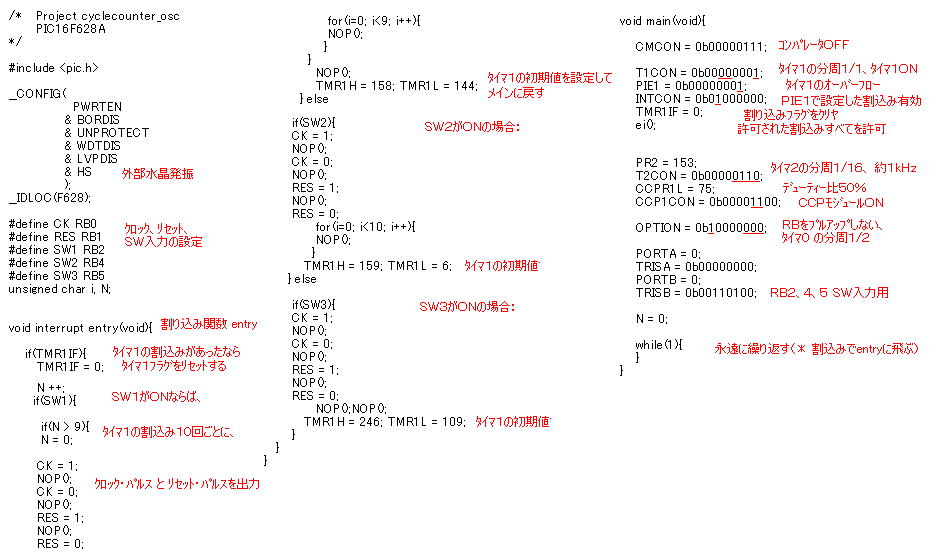
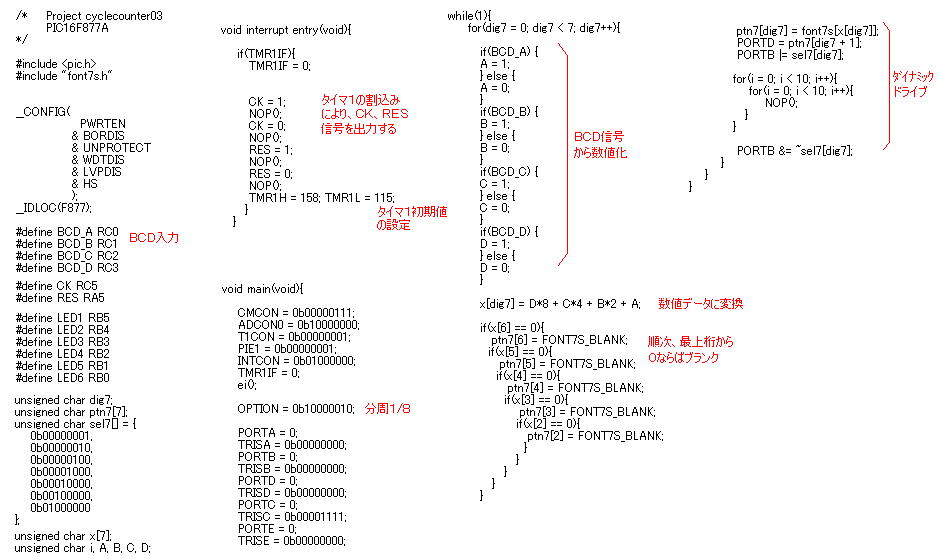
丂丂僾儘僌儔儉偼丄儊僀儞偱偼壗傕偣偢 倵倛倝倢倕乮侾乯偱塱墦偵孞傝曉偟偰偄傞偩偗偱丄僞僀儅侾偺僆乕僶乕僼儘乕偵傛偭偰 娭悢 entry 偵旘傇丅乮interrupt 偼妱傝崬傒娭悢偺摢偵晅偗傞乯丂僞僀儅侾偺妱傝崬傒偑敪惗偟偨側傜丄俽倂偺俁偮偺忬懺偵墳偠偰丄僋儘僢僋僷儖僗偲儕僙僢僩僷儖僗傪弌椡偟偨屻丄偦傟偧傟偺僞僀儅侾偺弶婜抣傪嵞愝掕偟偰儊僀儞娭悢偵栠偡偙偲偵傛偭偰僎乕僩^僀儉傪寛傔傞丅乮僞僀儅侾偼丄俀僶僀僩亖俇俆俆俁俆傑偱愝掕壜擻偱丄偙傟偑暘夝擻偵側傞丅俿俵俼侾俫乮忋埵價僢僩 俀俆俇乯 偲 俿俵俼侾俴乮壓埵價僢僩 俀俆俇乯偵暘偗偰昞帵偡傞丅乯丂憓擖偝傟偨 俶俷俹乮 乯偼丄僞僀儅侾偺嵟彫暘夝擻偲傎傏摨偠偩偭偨偺偱丄徣棯偟偰僞僀儅侾偺傒偱寛傔偰傕椙偄丅
丂丂俽倂侾乮栺侽丏侾俽乯偺応崌丄僞僀儅侾偺嵟戝帪娫傪挻偊傞偺偱丄栺侽丏侽侾俽傪侾侽夞孞傝曉偟偨丅
丂丂傑偨丄僟僀僫儈僢僋丒僪儔僀僽偺嬱摦梡僷儖僗偵偼丄僞僀儅俀偺 俠俠俹儌僕儏乕儖偵傛傞 俹倂俵怣崋傪梡偄偨丅乮栺侾倠俫倸丄僨儏乕僥傿乕斾栺俆侽亾丄俆倁曽宍攇乯
丂丂寢壥偼丄僞僀儅侾偲僞僀儅俀偺姳徛側偳婲偙傜偢丄埨掕偟偰偄偰妸傜偐側摦偒偱偁傝丄應掕惛搙傕儗儞僕愗懼偵傛傝 俆乣俇寘傑偱偼俷俲偩偭偨丅乮廃攇悢 栺俆侽俵俫倸傑偱惓妋丄偨偩偟丄俁侽俵俫倸傪挻偊傞偲應掕偺鑷抣偑崅偔側傞偺偱丄幚梡斖埻偼 俁侽悢俵俫倸掱搙丅悈徎敪怳巕乮侾侽丏侽侽侽俵俫倸乯偺惛搙偼崅偔側偄偑丄埨掕搙偼廩暘偁傞丅乯丂
丂丂丒丒丒丒丒丂係丏侽侽侽俵俫倸丄侾係丏俁侾俉侾俉俵俫倸丄係俉丏侽侽侽俵俫倸偺偦傟偧傟偺僋儕僗僞儖僆僔儗乕僞偵傛傞應掕寢壥偱偼丄丂儗儞僕侾丗丂係丏侽侽侽丄 侾係丏俁侾俉丄 係俉丏侽侽侽丄丂儗儞僕俀丗丂係丏侽侽侽侽丄 係丏俁侾俉俀丄俉丏侽侽侽俆丄丂儗儞僕俁丗丂俋俋俋俋俆丄 俁侾俉侾俋丄俋俋俋俉俇丂偺傛偆偵側偭偨丅偙傟埲忋偼丄俿俵俼侾俴偺悢抣侾偮傪憹尭偡傞偲 傛傝戝偒偔偢傟傞偺偱丄偙偺曈偑挷惍偺尷奅偲側傞丅
丂
丂丂仠丂僜乕僗丗
丂丂仏丂俿俿俴 俬俠曽幃偺廃攇悢僇僂儞僞乕偼旕忢偵寴楽偱丄嶌偭偰偐傜俁擭偵傕側傞偑栤戣側偔摦偄偰偄傞丅丂偦偺愄丄廃攇悢僇僂儞僞乕偺挷惍偼丄奺儗儞僕偛偲偵寛傔傜傟偨廃攇悢偵悈徎傪嶌傝丄僉儍僢僾傪奜偟偰悈徎怳摦巕偵乭愒僠儞乭傪揾偭偰旝挷惍偟偨偦偆偱偁傞丅
丂丂俀丏丂慡俹俬俠壔偺帋傒丗
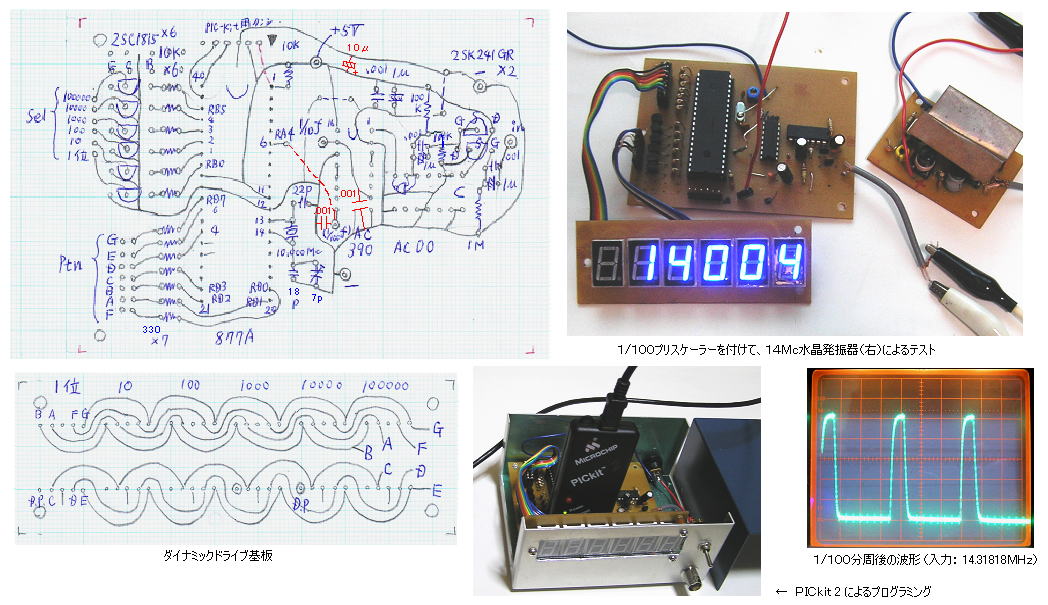
丂丂岺嶌偼斾妑揑娙扨偱丄僟僀僫儈僢僋僪儔僀僽偺偨傔懡偔偺弌椡僺儞偑昁梫側偺偱丄係侽倫倝値偺 俹俬俠侾俇俥俉俈俈俙傪梡偄偨丅
丂丂崅廃攇偺寁悢乮僞僀儅侽偺僋儘僢僋僜乕僗乮俿侽俠俲俬丗 俼俙係丄俁侽俵俫倸傑偱乯偐傜擖椡丅偲傝偁偊偢丄俀亊俆侽亖侾侽侽偛偲偵師偺侾侽恑僜僼僩僇僂儞僞傊丅壗恑偱偁偭偰傕丄嵟戝俀僶僀僩埲壓側傜偽屻偺墘嶼偱廋惓偱偒傞丅乯丄僎乕僩僞僀儉偛偲偺妱崬傒乮僞僀儅侾偺僆乕僶乕僼儘乕乯丄俈僙僌儊儞僩昞帵婍偺僟僀僫儈僢僋僪儔僀僽乮僞僀儅侾偲俶夞偵侾夞摨婜偝偣傞乯 偺俁偮傪丄堦偮偺俹俬俠偱峴側偆偲偄偆帋傒偩偭偨偑丄寢榑偐傜尵偆偲丄柍棟偑偁偭偨丅
丂丂栤戣揰偺侾偮栚偼丄寁應偟偨悢抣偺昞帵偑丄 侾乣俁寘栚偺掅埵寘偱 俀侽夞偵侾夞偔傜偄掅偄抣偲崅偄抣傪帵偡偙偲偱偁傝丄僎乕僩僞僀儉傪侾乮俽乯偵偟偰傕俁乣係寘偺惛搙偟偐弌側偄偙偲偱偁傞丅
丂丂偙傟偼丄儊僀儞偱偺寁應抣傪僞僀儅侾偺妱崬傒偱僉儍僾僠儍乕偡傞偲偒丄儊僀儞偺儖乕僾偺偳偙偱妱傝崬傒偑敪惗偡傞偐偵傛傞丅
丂丂傑偨丄妱崬傒偱丄僟僀僫儈僢僋僪儔僀僽偺俶夞乮俶亖俀俆侽侽乯偵侾夞偢偮僨乕僞傪峏怴偡傞偺偱丄僞僀儅侾偺弶婜抣愝掕偵傛傞暘夝擻偑埆偔側傞丅
丂丂偝傜偵丄妱傝崬傒娭悢傊堏峴偡傞偲丄僞僀儅侽偼柍娭學偵偦偺傑傑摦偄偰偄傞偑丄忋埵偺僜僼僩僇僂儞僞乕乮僾儘僌儔儉忋偺僇僂儞僞乕乯偼偡傋偰巭傑偭偰偟傑偆丅偙偺偨傔丄
丂丂丂丒丂妱傝崬傒捈屻丄倐亖俿俵俼侽 偲抲偄偰屌掕偟丄妱崬傒偐傜敳偗傞捈慜偵丄俿俵俼侽亖倐 偲偟偰栠偟丄偦偙偐傜嵞僗僞乕僩偡傞丅
丂丂丂丒丂俿侽俠俲俬乮俼俙係乯倫倝値 偵 俼俙俆 倫倝値傪寢崌偟丄俼俙俆傪弌椡梡乮侽乯偵偡傞偙偲偱嫮惂揑偵俿侽俠俲俬偐傜偺擖椡傪幷抐偡傞丅
丂丂丂丒丂奜晹偺僎乕僩乮俈係俴俽侽侽側偳乯傪巊偭偰擖椡傪幷抐偡傞丅
側偳偺曽朄傪帋傒偨偑丄偁傑傝岠壥偑柍偐偭偨丅
丂丂 偙偺廃婜揑側岆嵎傪廋惓偡傞僾儘僌儔儉傪捛壛偡傞昁梫偑偁傞丅
丂丂栤戣揰偺俀偮栚偼丄懆偊偨悢抣僨乕僞傪墘嶼張棟偡傞嵺丄庒姳偺帪娫偑偐偐傞偨傔丄僟僀僫儈僢僋僪儔僀僽偺昞帵偵僎乕僩僞僀儉偛偲偺偪傜偮偒偑弌傞偙偲偱偁傞丅僎乕僩僞僀儉傪侾俽掱搙偵偟偰栚棫偨側偄傛偆偵偡傞偙偲偱夝寛偟偨丅乮帪寁偺傛偆偵侾昩偛偲偵慡懱偑揰柵偡傞偑丄栚忈傝偲偄偊偽栚忈傝乯
丂丂仏丂偡傋偰堦偮偺俹俬俠偱僐儞僷僋僩偵峴側偆偵偼丄俴俤俢昞帵偺僟僀僫儈僢僋僪儔僀僽偼柍棟偱偁傝丄僟僀僫儈僢僋僪儔僀僽婡擻偑撪憼偝傟偰偄傞 俴俠俢昞帵婍傪梡偄傞傋偒偱偁傞丅 俴俠俢昞帵偱偼丄妱傝崬傒娭悢傪梡偄傞偙偲傕柍偔 晛捠偺娭悢傪屇傃弌偡宍偱丄惛搙偑崅偔丄妱崬傒偳偍偟偺姳徛傕婲偙傜側偄丅
丂
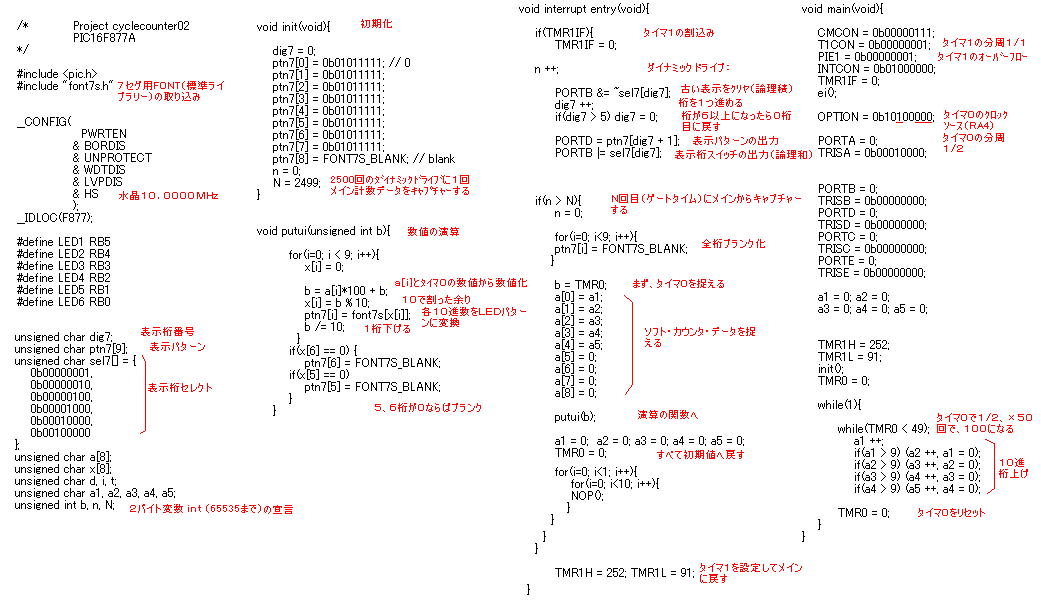
丂丂仠丂僜乕僗丗丂丂丂font7s.h 丗乮俫倕倎倓倕倰 倖倝倢倕倱 偵揬傞乯
丂丂俁丏丂俿俿俴僇僂儞僩婎斅偺俹俬俠偵傛傞惂屼丗
丂丂俹俬俠偺儊僀儞僾儘僌儔儉偵傛傞寁悢傪巭傔丄俿俿俴 俬俠 偵傛傞僇僂儞僩婎斅乮俁寘亊俀枃亖俇寘暘乯傪嶌惢偟丄偙傟傪俹俬俠婎斅偐傜惂屼偡傞乮俠俲丄俼俤俽乯偲摨帪偵丄僇僂儞僩婎斅偐傜偺俛俠俢怣崋乮係價僢僩丗 俙丄俛丄俠丄俢乯傪擖椡偟丄悢抣壔丄俈僙僌俥俷俶俿壔偟偰丄偙偺儊僀儞偺曽偱 僟僀僫儈僢僋僪儔僀僽偡傞丅 僞僀儅侾偵傛傞妱崬傒偱偼丄僎乕僩僞僀儉偵傛傞俠俲丄俼俤俽弌椡偺傒傪峴側偆丅丂僇僂儞僩婎斅傊偺僟僀僫儈僢僋僪儔僀僽梡 俻侾乣俻俇弌椡偼丄倱倕倢 [ ]乮俼俛侽乣俆乯偐傜攝慄偟偨丅乮俻俇丗俼俛侽丄 俻俆丗俼俛侾丄丒丒丒丄俻侾丗俼俛俆乯
丂丂僇僂儞僩婎斅偼 俈係俴俽俋侽傪梡偄偰侾侽恑僇僂儞僩偟偨偑丄俋俁側偳偵傛傞侾俇恑僇僂儞僩傪偡傟偽俬俠傪愡栺偱偒傞丅乮俆僙僢僩偱俈寘乯
丂丂偙偙偱丄俿俿俴儗儀儖偲 俠亅俵俷俽儗儀儖乮俹俬俠乯偲偺儅僢僠儞僌偺栤戣偑偁傝丄俿俿俴偺俛俠俢弌椡偵偼侾俵兌乣侾丏俇俆俵兌掱搙偺崅掞峈偱傾乕僗偵棊偲偡昁梫偑偁偭偨丅乮僇僂儞僞婎斅俀枃偵偮偄偰掞峈侾儢強丅 僗僀僢僠儞僌丒僟僀僆乕僪偵暲楍偡傞掞峈孮偼晄梫丅 俿俿俴偺擖椡僗儗僔儂乕儖僪儗儀儖栺俁倁偵懳偟丄俠亅俵俷俽乮俹俬俠乯偼 係倁嬤偔昁梫丅乯丂侾丏偲堘偭偰丄俠俲偐傜僐儞僨儞僒乕偱棊偲偡昁梫偼側偐偭偨丅 傑偨丄僽儔儞僋夞楬偼摿偵慻傑偢丄儊僀儞僾儘僌儔儉偱峴側偆丅
丂丂昞帵偵梡偄偨 惵怓挻崅婸搙俈僙僌俴俤俢乮俷俽俴侾侽俆俇侾亅俴俛丄僇僜乕僪僐儌儞乯偼偒傢傔偰婸搙偑崅偄偺偱丄係俈侽兌偺掞峈傪捠偟偰嬱摦偟偨丅
丂丂婎斅傪俁枃廳偹偰丄俹俽亅俀偺働乕僗偵妝偵廂傑偭偨丅揹尮偼俆倁傾僟僾僞乕乮侾俙乯傪巊梡丅乮徚旓揹椡丗 俆倁丄侾俆侽倣俙掱搙乯
丂丂偙偪傜偺曽偼丄侾丏偲摨條偵丄偪傜偮偒傕柍偔丄惓妋偵應掕偱偒偨丅乮俆乣俇寘乯丂 偨偩偟丄俀侽俵俫倸埲忋偺斾妑揑崅廃攇懁傗丄曄摦偡傞廃攇悢尮乮俴俠敪怳側偳乯偱偼丄廃婜揑偵晄埨掕側昞帵傪偡傞偙偲偑偁傞丅
丂丂偟偨偑偭偰丄侾/侾侽侽偺僾儕僗働乕儔乕乮俈係俙俠侽侽 亄 俈係俙俠俁俋侽丄 侾/侾侽偼崅挷攇偑懡偔偰巊偊側偄乯傪晅偗偰丄崅廃攇愱梡乮僾儕僗働乕儔乕擖椡 侾俉侽俵俫倸倣倎倶偱丄僇僂儞僞乕偱偺捈愙偺寁應偼侾丏俉俵俫倸埲壓乯偵偟偨曽偑椙偄偲巚傢傟傞丅
丂
丂
丂丂仠丂僜乕僗丗丂丂丂font7s.h 丗乮俫倕倎倓倕倰 倖倝倢倕倱 偵揬傞乯